题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
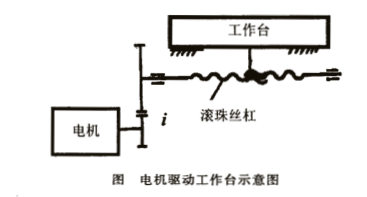
下图所示为某数控工作台X方向的传动系统简图,已知电动机为三相反应式步进电动机,转子的齿数为80,采用三相六
拍的工作方式,丝杠螺距P=12mm,齿轮的齿数Z1=20,若要求该工作台X方向的脉冲当量δx=0.01mm,请求出被动齿轮Z2。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
拍的工作方式,丝杠螺距P=12mm,齿轮的齿数Z1=20,若要求该工作台X方向的脉冲当量δx=0.01mm,请求出被动齿轮Z2。
如果结果不匹配,请 联系老师 获取答案
 更多“下图所示为某数控工作台X方向的传动系统简图,已知电动机为三相…”相关的问题
更多“下图所示为某数控工作台X方向的传动系统简图,已知电动机为三相…”相关的问题
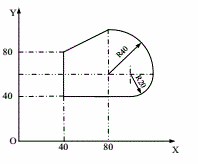
用φ10mm的立铣刀铣削工件轮廓,起刀点为(0,0),工件尺寸及加工路线如下图所示,试按相对坐标完成数控铣削手工编程,I、J、K为圆弧起点相对其圆心(圆心指向起点的矢量)的X、Y、Z坐标值的地址符(主轴转速为600r/m,进给速度为150mm/min,机床具有刀具半径补偿功能)。
某简支梁受力情况如下图所示,其中心点处的弯矩数值大小为()。
.jpg)
A.1/2qL2
B.qL2
C.1/4qL2
D.1/8qL2
A.v=25 m/s,向x轴负方向传播
B.v=50 m/s,向x轴负方向传播
C.v=25 m/s,向x轴正方向传播
D.v=50 m/s,向x轴正方向传播
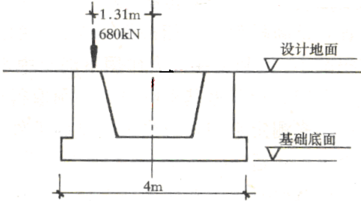
某构筑物基础如下图所示,在设计地面标高处作用有偏心荷载680kN,偏心距1.31m,基础埋深为2m,底面尺寸为4m×2m。试求基底平均压力p和边缘最大压力pmax,并确定基底沿偏心方向与地基脱开部分的边长。
用数控铣床加工下图所示的轮廓ABCDEA。试按照所学的代码格式(JB 3208-1983)编制加工程序。要求:

(1)在给定机床坐标系和编程坐标系关系下用绝对坐标方式编写加工程序;
(2)机床坐标原点即为起刀点也为刀具终点;
(3)加工路径为①—②—③—④—⑤—⑥—⑦,主轴转速900r/min,进给速度150mm/min。(不考虑刀补功能)
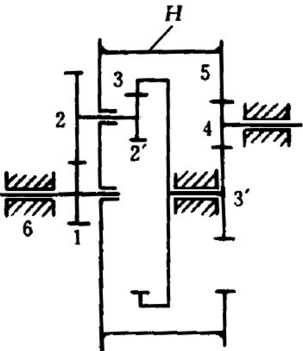
下图所示电动卷扬机传动简图中,已知各轮齿数为:z1=24,z2=48,z2'=30,z3=90,z3'=20,z4=40,z5=100。试求传动比i1H。若电动机转速n1=1450r/min,其卷筒转速nH为多少?
一焊接工字形截面简支梁,梁截面已知。如下图所示,跨度12m,梁跨度中点处作用一集中荷载F=900kN(设计值),且在跨中有一侧向支承。钢材为Q235B,焊条为E43系列,手工焊。