题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
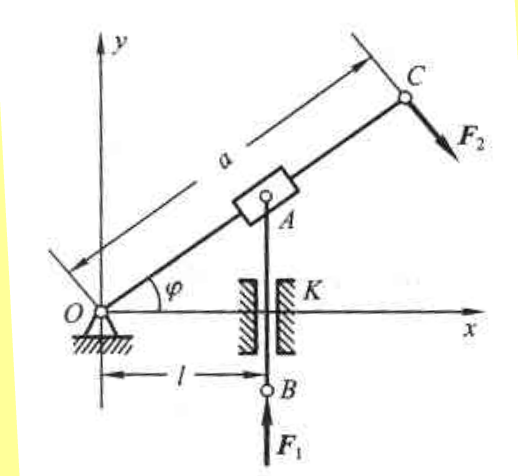
如下计算对不对?错在哪里? (1)图8-4(a),中取动点为滑块A.动参考系为杆OC,则ve=ω·OA,va=vecosφ (2)图8-4
如下计算对不对?错在哪里?

(1)图8-4(a),中取动点为滑块A.动参考系为杆OC,则ve=ω·OA,va=vecosφ
(2)图8-4(b)中vBC=ve=vacos60°
va=ωr
因为 ω=常量
所以 vBC=常量,
(2)图8-4(c),中为了求aa的大小,取加速度在η轴上的投影式:
aacosφ-ac=0
所以
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“如下计算对不对?错在哪里? (1)图8-4(a),中取动点为…”相关的问题
更多“如下计算对不对?错在哪里? (1)图8-4(a),中取动点为…”相关的问题